Робот исследователь
0
Добавил: Valentin (Связаться с автором)
Made in: ЦМИТ Model Spectr
Описание
Цель проекта:
Создание робота для исследования обьектов и местности удаленной и недоступной или опасной для человека.
Описание проекта:
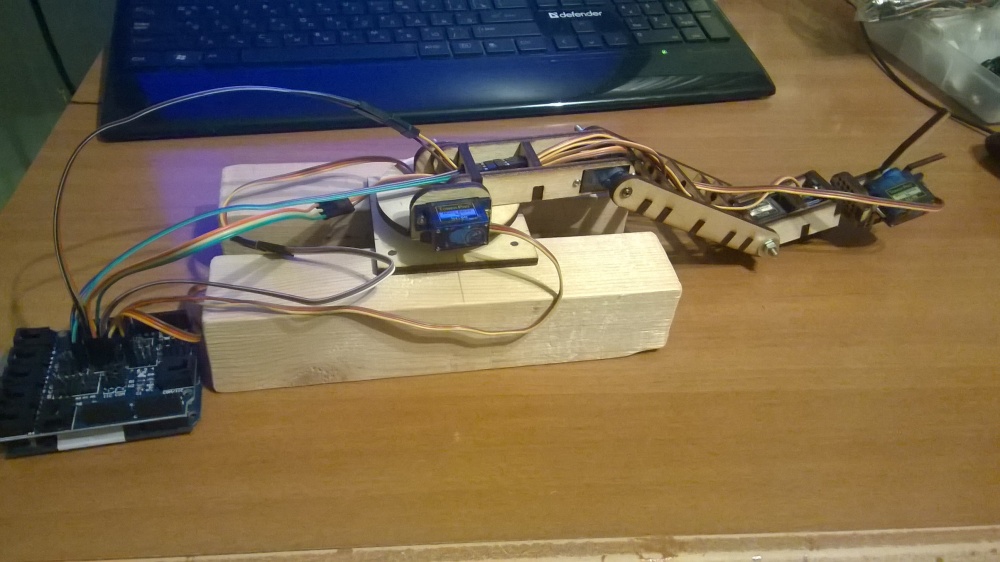
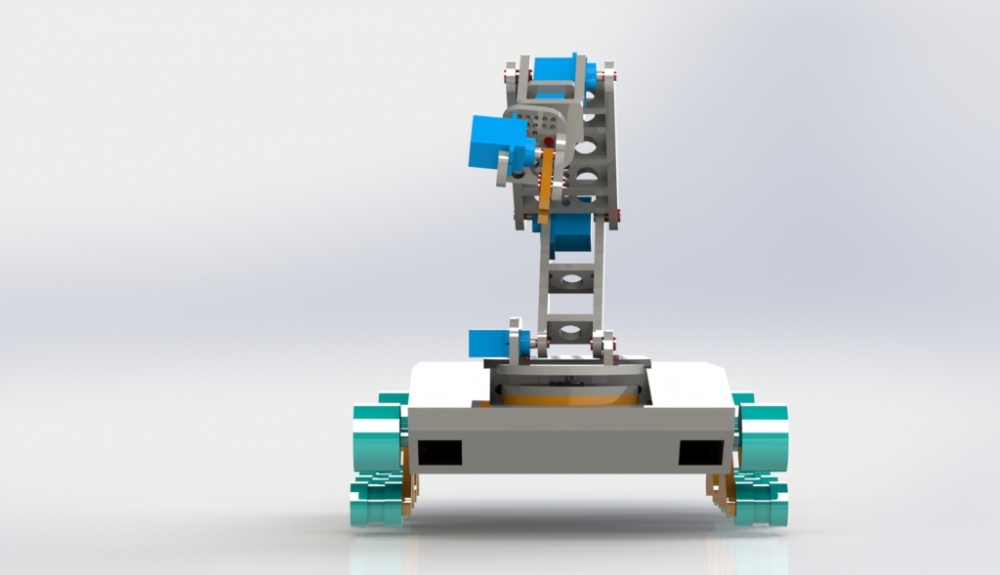
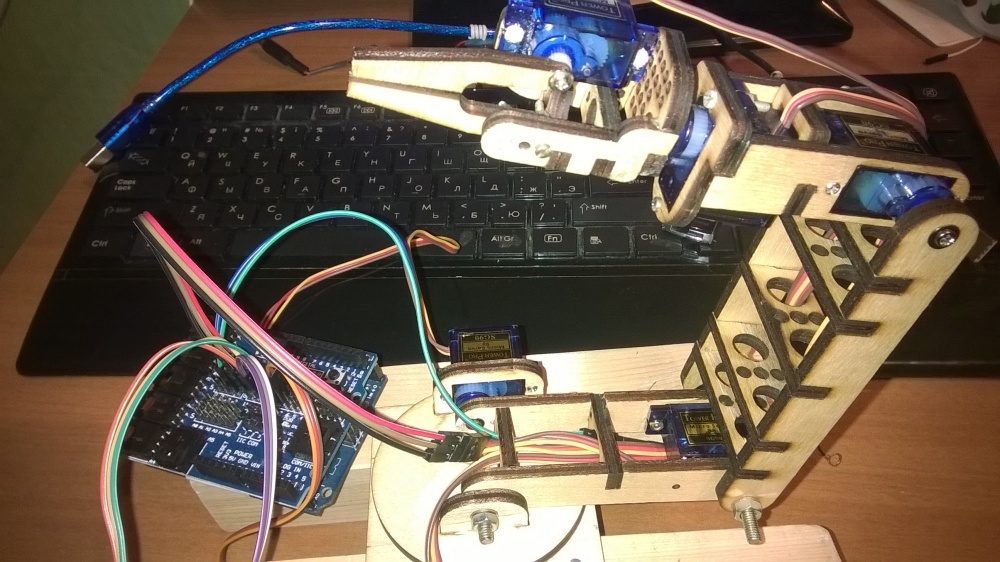
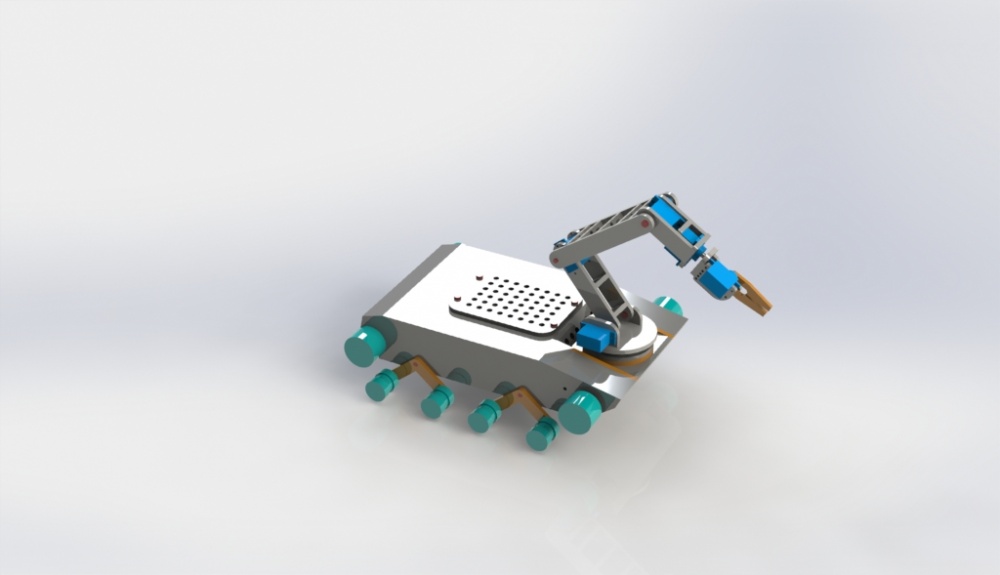
Робот выполнен на базе Arduino, на данный момент связь с ним осуществляется с помощью Bluetooth или nrf24l01. Манипулятор имеет 5 степеней свободы, в его конструкции использованы сервомоторы sg90 и mg90s, каркас манипулятора сделан из фанеры толщиной 4мм. Гусеничная платформа также выполнена из фанеры толщиной 4мм. Для получения видео в реальном времени с робота на него планируется установка ipкамеры и роутера.
Особенности конструкции:
Так как детали вырезались на лазерном станке, то некоторые детали потребовалось дополнительно обработать для придания им необходимой формы.Эта версия робота является тестовым прототипом, на которой было протестированно несколько типов моторов, поэтому специальных отверстий для установки моторов в файлах для станка не имеется. Для установки моторов и катков необходимо просверлить отверстия в нужных местах стенок робота. Клешня имеет несколько сменных насадок для выполнения широкого спектра задач. Управление роботом осуществляется с компьютера через специально написанную программу (только через Bluetooth) или со специального пульта (Bluetooth и nrf24l01). Робот может преодолевать препятствия и преграды благодаря наличию подвески, использование гусениц вместо колёс также улучшило его проходимость. На роботе можно установить дополнительные датчики и сенсоры для исследований местности. Также на крыше робота предусмотрено место для установки небольшого количества солнечных батарей.
Планы по усовершенствованию конструкции:
В дальнейшем планируется заменить все сервомоторы в манипуляторе на mg90s и сделать его каркас из оргстекла или фанеры толщиной 2мм. Каркас танковой платформы также планируется улучшить, сделав его из металла или других более прочных материалов.
Создание робота для исследования обьектов и местности удаленной и недоступной или опасной для человека.
Описание проекта:
Робот выполнен на базе Arduino, на данный момент связь с ним осуществляется с помощью Bluetooth или nrf24l01. Манипулятор имеет 5 степеней свободы, в его конструкции использованы сервомоторы sg90 и mg90s, каркас манипулятора сделан из фанеры толщиной 4мм. Гусеничная платформа также выполнена из фанеры толщиной 4мм. Для получения видео в реальном времени с робота на него планируется установка ipкамеры и роутера.
Особенности конструкции:
Так как детали вырезались на лазерном станке, то некоторые детали потребовалось дополнительно обработать для придания им необходимой формы.Эта версия робота является тестовым прототипом, на которой было протестированно несколько типов моторов, поэтому специальных отверстий для установки моторов в файлах для станка не имеется. Для установки моторов и катков необходимо просверлить отверстия в нужных местах стенок робота. Клешня имеет несколько сменных насадок для выполнения широкого спектра задач. Управление роботом осуществляется с компьютера через специально написанную программу (только через Bluetooth) или со специального пульта (Bluetooth и nrf24l01). Робот может преодолевать препятствия и преграды благодаря наличию подвески, использование гусениц вместо колёс также улучшило его проходимость. На роботе можно установить дополнительные датчики и сенсоры для исследований местности. Также на крыше робота предусмотрено место для установки небольшого количества солнечных батарей.
Планы по усовершенствованию конструкции:
В дальнейшем планируется заменить все сервомоторы в манипуляторе на mg90s и сделать его каркас из оргстекла или фанеры толщиной 2мм. Каркас танковой платформы также планируется улучшить, сделав его из металла или других более прочных материалов.


0 комментариев