XIX интенсив для школьников"Трасса 60" Команда МГСП
Введение в задачу
Начнем с концепции: мы хотим робота, который может самостоятельно передвигаться, при этом объезжать все препятствия, встречаемые на своем пути.Нам понадобилось:
Arduino uno2 двигателя
Провода
3 ультразвуковых датчика HC-SR04
Аккумулятор
Дальномер
Мы взяли ультразвуковой датчик HC-SR04.

Arduino uno:
Это торговая марка аппаратно-программных средств для построения простых систем автоматики и робототехники, ориентированная на непрофессиональных пользователей. Программная часть состоит из бесплатной программной оболочки (IDE) для написания программ, их компиляции и программирования аппаратуры. Аппаратная часть представляет собой набор смонтированных печатных плат, продающихся как официальным производителем, так и сторонними производителями. Полностью открытая архитектура системы позволяет свободно копировать или дополнять линейку продукции Arduino.На Arduino Uno предусмотрено всё необходимое для удобной работы с микроконтроллером: 14 цифровых входов/выходов (6 из них могут использоваться в качестве ШИМ-выходов), 6 аналоговых входов, кварцевый резонатор на 16 МГц, разъём USB, разъём питания, разъём для внутрисхемного программирования (ICSP) и кнопка сброса.
Алгоритм работы робота:
На ножку Trig подается сигнал, что запускает генератор, создающий пачку коротких импульсов на передатчике. Далее, приемник получает отраженный сигнал и на ножке Echo генерируется прямоугольный сигнал, длина которого пропорциональна времени между излучением импульсов и детектированием их приемником.Затем сигнал подается на плату и в зависимости от сигнала с сонара вращает правый или левый двигатель.
Корпус:
Создавался в программе fusion 360, затем вырезался на лазерном станке.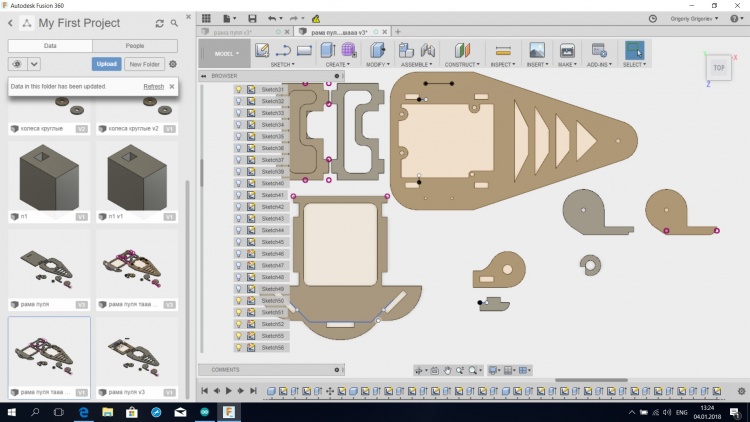
0 комментариев