
Автоматизированный склад
+1
Добавил: teleitems (Связаться с автором)
Made in: Фаблаб Политех
Описание
С каждым годом автоматизация производственных и логистических процессов набирает всё больший оборот. Особое место в этой индустрии занимает автоматизация складов. От небольших «стоек» с комплектующими, до фантастических размеров «фабрик хранения», размером с футбольное поле и высотой в многоэтажный дом.
Большинство решений имеет довольно громоздкую и неделимую конструкцию. Масштабирование в таком случае, как правило, выполняется просто за счет установки нескольких «аппаратов», которые никак не связаны друг с другом.
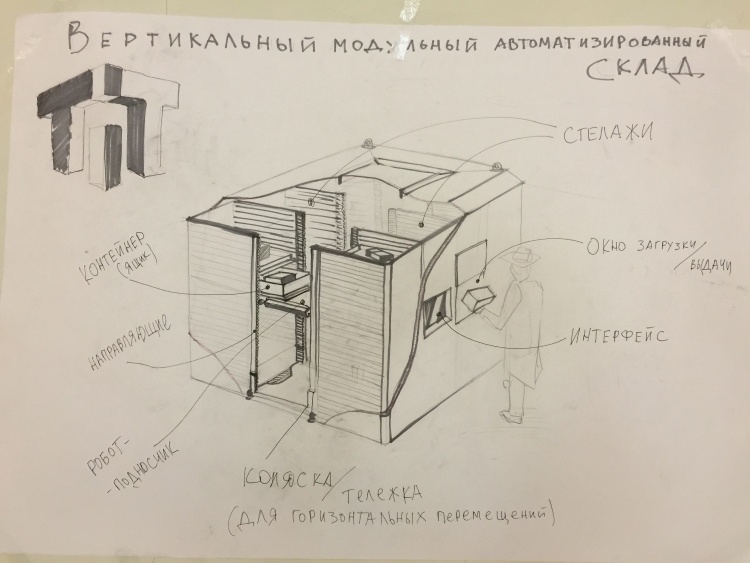
Идея проекта заключается в том, чтобы вся конструкция была максимально дешевой и пассивной. Никаких «кран-штабелеров», «каруселей» и т.д. В центре системы — довольно простой робот, который перемещается по специальным направляющим вдоль матрицы ячеек с контейнерами, и может выполнять захват и возврат контейнера. Изымая нужный ящик, он доставляет его к «точке доступа», где пользователь может получить физический доступ к содержимому.
Разработка проводилась в рамках инженерной школы ФабЛаба Политеха. Поэтому на всю работу, от идеи на бумажки до рабочего устройства, по регламенту была всего одна неделя.
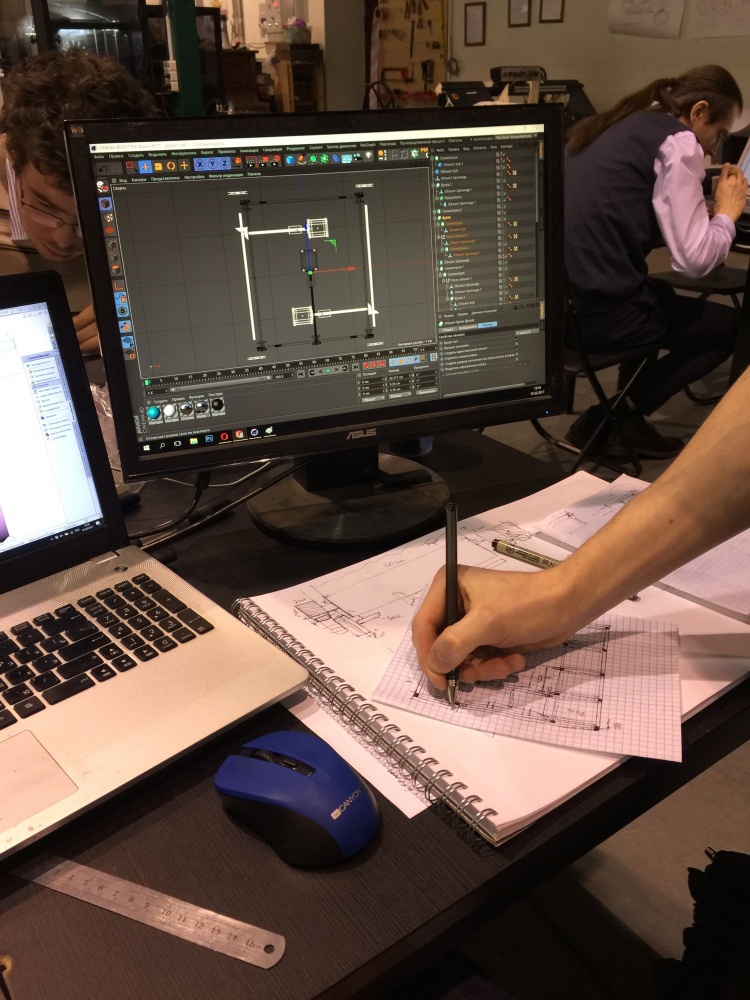
Для начала наш дизайнер набросал общий вид конструкции:
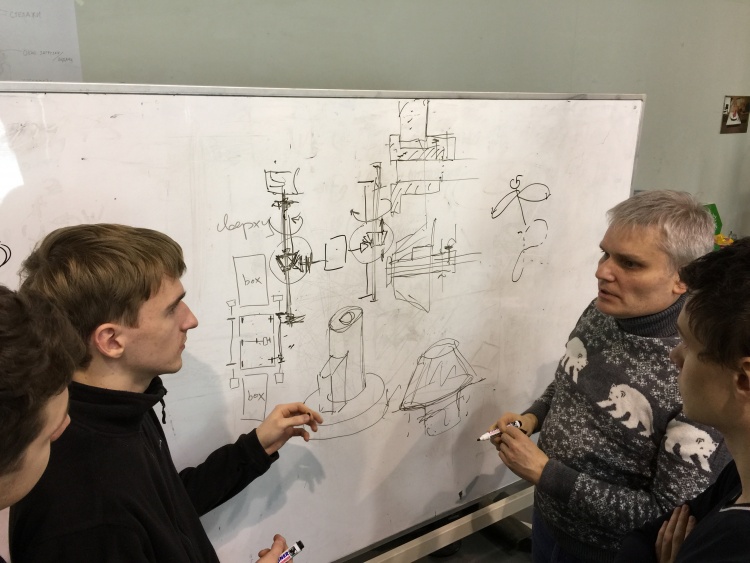
Основную сложность представляла механика робота. По задумке он должен держаться на нужной высоте только благодаря четырем зубчатым колесам.
Начались первые дискуссии:
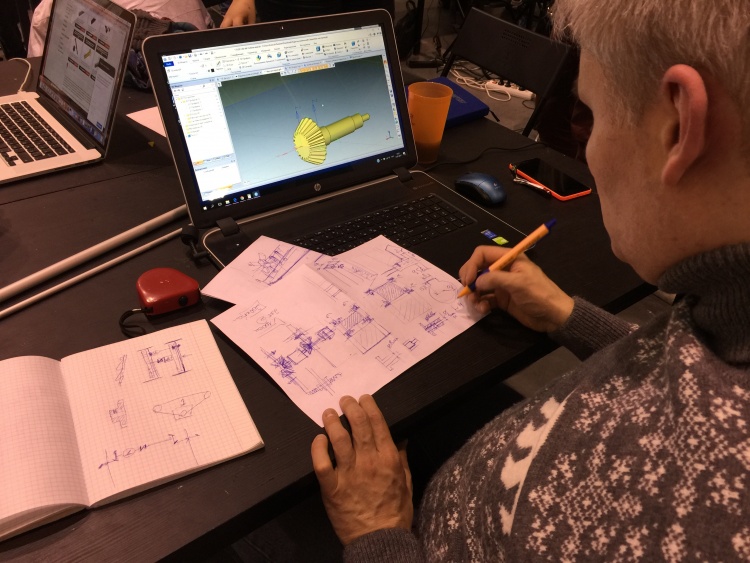
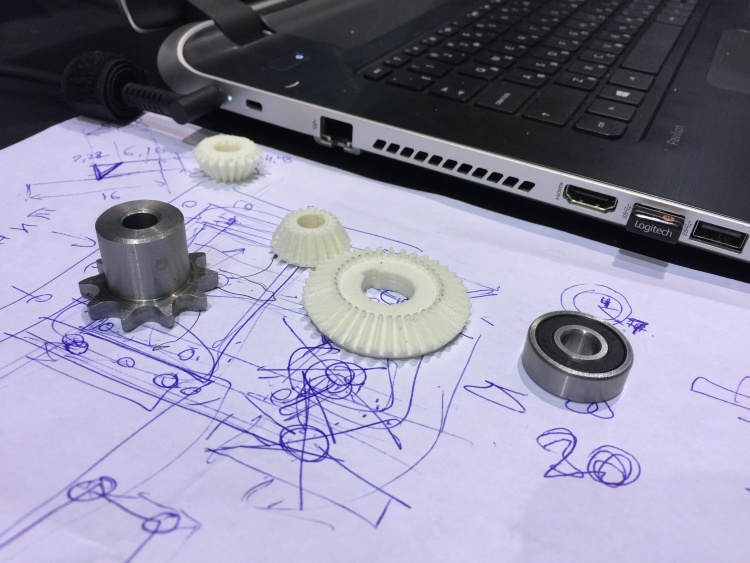
Для простоты управления в качестве двигателей были выбраны шаговики. А крутящий момент было принято раздавать на оси с помощью конических шестерней:
При закупке железа мы сразу же столкнулись с проблемой жутко дорогих драйверов на мощные шаговки (NEMA 23 и выше). Они относятся к промышленному классу. Поэтому драйверы для них стоят обычно минимум от 3-5 тыс. рублей. Кроме всего, у нас было жесткое ограничение по времени — одна неделя. Поэтому при закупках приходилось руководствоваться и фактором локальности — то что можно поехать и купить в течение одного дня.
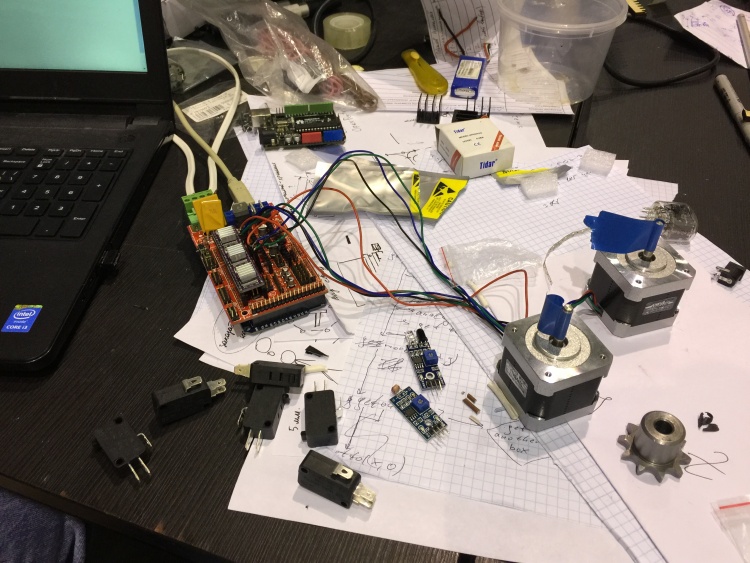
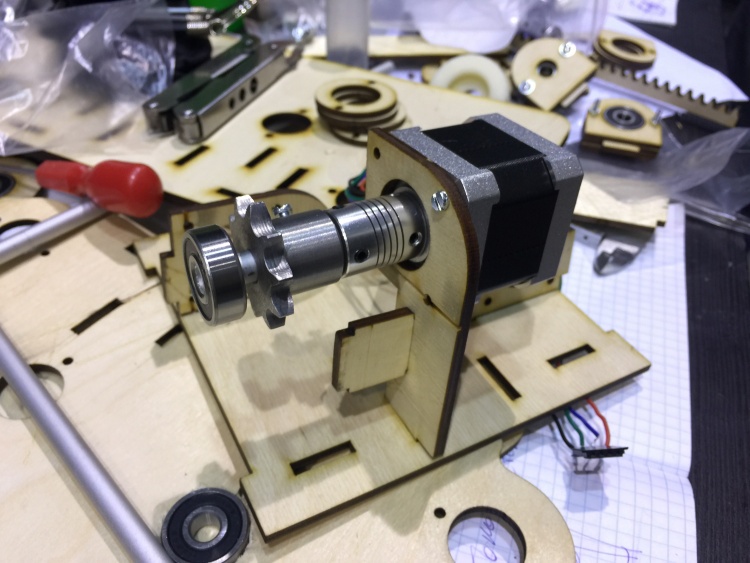
В итоге мы остановилсь на движках NEMA 17, а в качестве драйверов было решено взять Ramps. С одной стороны, он содержал ряд лишних компонентов, с другой — был очень удобен для прототипа, чтобы минимизировать лишние провода и отдельные платы. Основным контроллером стала Arduino Mega. В итоге все имело довольно компактный и аккуратный вид:
Тем временем мы закупили подшипники и звездочки (которые планировалось исползьвать для цепного механизма захвата и сброса контейнеров) и отпечататли первые шестерни:
Еще одним пунктом, вытекающим из ограничения с мощностью моторов, стало решение разместить два тяговых мотора — по одному на ось, а не один общий, как это планировалось изначально:
Параллельно с этим началось изготовление основной конструкции. Мы решили построить ее из квадратного алюминиевого профиля 20 на 20 мм. Для резки использовали ленточную пилу:

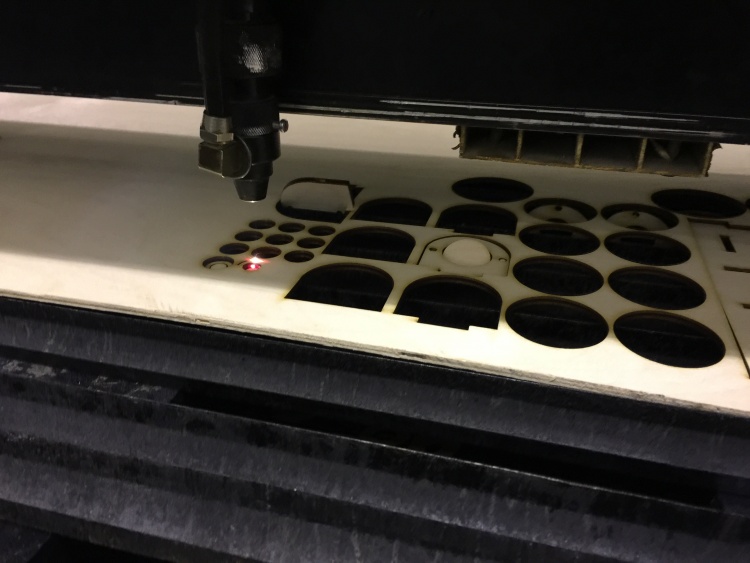
Большую часть деталей робота мы решили для оперативности резать из фанеры:
На какой-то момент начали появляться первые очертания. Общего корпуса робота:

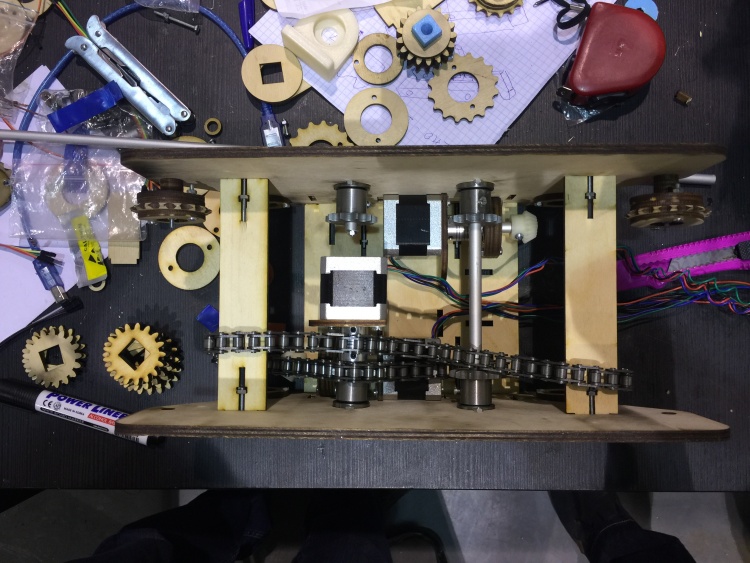
Ключевых узлов:
И несущей конструкции:
Так как с цепями до этому никому из команды работать не приходилось, мы начали в первую очередь отрабатывать именно этот механизм. Идея была в том, что по бортам робота должны быть синхронно движущиеся цепи, в некоторые звеньях которых должны быть встроены специальные зацепы.
В качестве тягового двигателя был опять же выбран шаговик. Главная приводная звездочка была куплена вместе с подшипниками в магазине. А вот торцевые звездочки были сделаны из составной фанеры. Ключевой слой с зубцами вследствие пришлось обточить под углом, чтобы цепь не стремилась заскочить на кромки зубцов:

Так как специального устройства для расклепки цепей у нас не было, пришлось просто стачивать в нужном месте звенья и потом соединять их специальным замком (который тоже был заранее куплен):

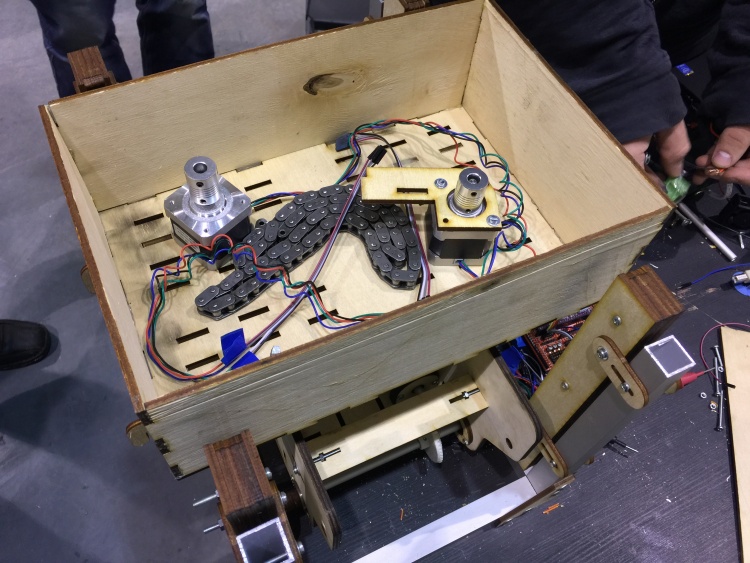
Следующим шагом на очереди было размещение двух тяговых двигателей для вертикального перемещения (по одному на каждую ось, как уже упомяналось выше):
Тем временем была закончена основная несущая конструкция, внутри которой должны как раз размещаться ячейки и перемещаться робот:

Также была сделана первая тестовая коробка и размещены уголки-направляющие для нее:

По самому первому плану робот был должен вобрать в себя как функционал вертикального перемещения, так и горизонтального перемещения между колонками. Но для того чтобы избежать довольно нетривиального механизма переключения стрелок, было решено разделить функции на две части — основного робота, который умеет перемещаться вертикально в колонке и захватывать-сбрасывать ящик, и тележку, которая будет перекатывать его между колонками:

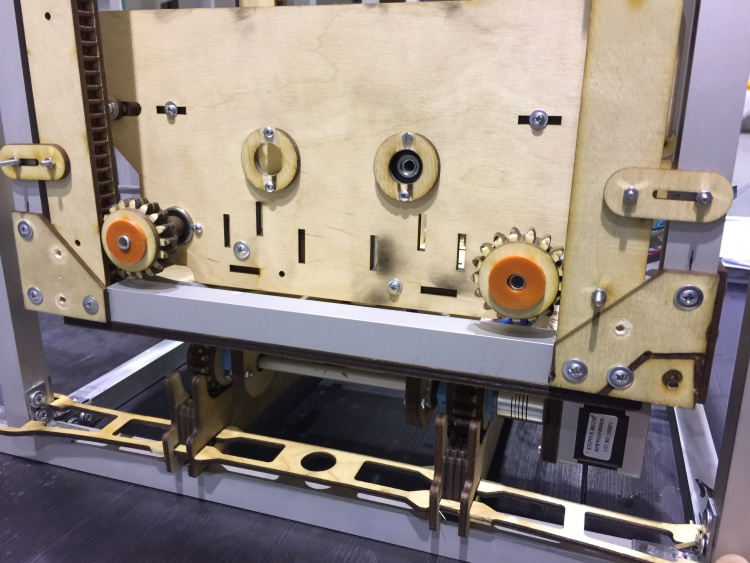
Наконец-то мы могли приступить к самому интересному — реальным тестам вертикального подъема работа по рейкам. В том числе с разной нагрузкой:
Тесты проводили прямо в тележке, т.к. она содержала в себе продолжение тех же самых зубчатых реек:

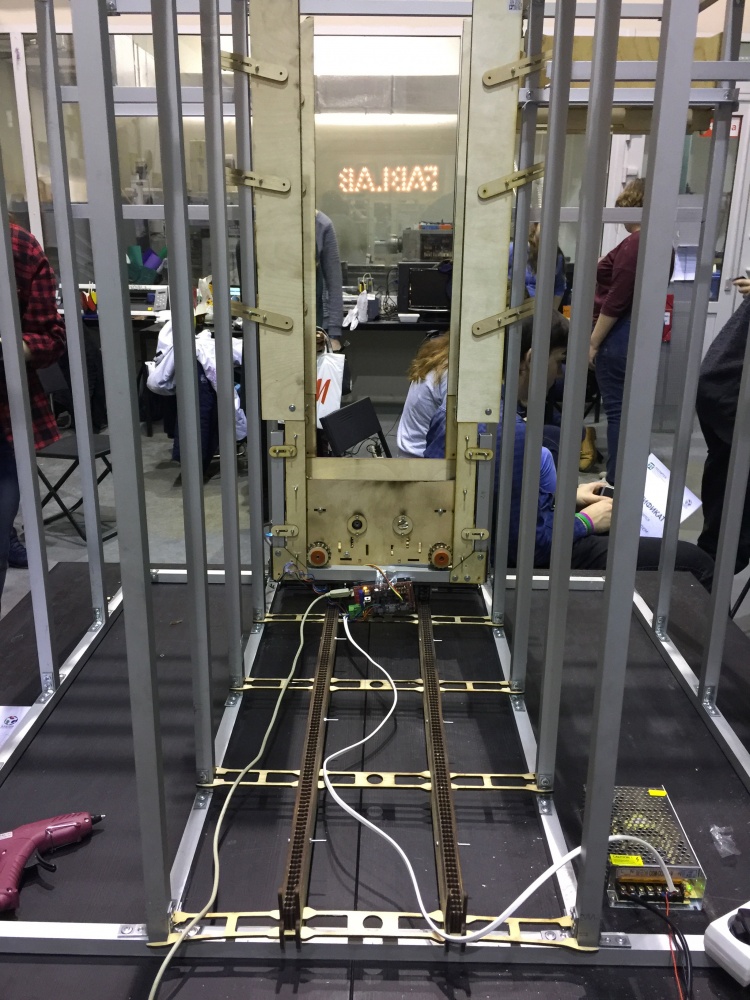
В последний день были вырезаны и уложены зубчатые рельсы для горизонтальной тележки и смонтирована для демонстрации одна колонка вертикальных реек:
Для тележки были выбраны аналогичные зубчатые колеса, а в качестве ходового двигателя был взят еще один шаговик, чтобы точно позиционировать тележку в колонке:
Конечно, в силу очень сжатого срока многое не удалось довести до ума. В первую очередь, это полноценно отработать механизм захвата контейнера и переход робота из тележки в колонку и обратно.
Также одним из главных выводов стала недостаточная, несмотря на все расчеты, мощность двигателей. Самодельного редуктора в виде конических шестерней оказалось мало, шаговые двигатели периодически пропускали шаги.
За новостями проекта можно следить в группе:
https://vk.com/teleitems
Большинство решений имеет довольно громоздкую и неделимую конструкцию. Масштабирование в таком случае, как правило, выполняется просто за счет установки нескольких «аппаратов», которые никак не связаны друг с другом.
Идея проекта заключается в том, чтобы вся конструкция была максимально дешевой и пассивной. Никаких «кран-штабелеров», «каруселей» и т.д. В центре системы — довольно простой робот, который перемещается по специальным направляющим вдоль матрицы ячеек с контейнерами, и может выполнять захват и возврат контейнера. Изымая нужный ящик, он доставляет его к «точке доступа», где пользователь может получить физический доступ к содержимому.
Разработка проводилась в рамках инженерной школы ФабЛаба Политеха. Поэтому на всю работу, от идеи на бумажки до рабочего устройства, по регламенту была всего одна неделя.
Для начала наш дизайнер набросал общий вид конструкции:
Основную сложность представляла механика робота. По задумке он должен держаться на нужной высоте только благодаря четырем зубчатым колесам.
Начались первые дискуссии:
Для простоты управления в качестве двигателей были выбраны шаговики. А крутящий момент было принято раздавать на оси с помощью конических шестерней:
При закупке железа мы сразу же столкнулись с проблемой жутко дорогих драйверов на мощные шаговки (NEMA 23 и выше). Они относятся к промышленному классу. Поэтому драйверы для них стоят обычно минимум от 3-5 тыс. рублей. Кроме всего, у нас было жесткое ограничение по времени — одна неделя. Поэтому при закупках приходилось руководствоваться и фактором локальности — то что можно поехать и купить в течение одного дня.
В итоге мы остановилсь на движках NEMA 17, а в качестве драйверов было решено взять Ramps. С одной стороны, он содержал ряд лишних компонентов, с другой — был очень удобен для прототипа, чтобы минимизировать лишние провода и отдельные платы. Основным контроллером стала Arduino Mega. В итоге все имело довольно компактный и аккуратный вид:
Тем временем мы закупили подшипники и звездочки (которые планировалось исползьвать для цепного механизма захвата и сброса контейнеров) и отпечататли первые шестерни:
Еще одним пунктом, вытекающим из ограничения с мощностью моторов, стало решение разместить два тяговых мотора — по одному на ось, а не один общий, как это планировалось изначально:
Параллельно с этим началось изготовление основной конструкции. Мы решили построить ее из квадратного алюминиевого профиля 20 на 20 мм. Для резки использовали ленточную пилу:
Большую часть деталей робота мы решили для оперативности резать из фанеры:
На какой-то момент начали появляться первые очертания. Общего корпуса робота:
Ключевых узлов:
И несущей конструкции:
Так как с цепями до этому никому из команды работать не приходилось, мы начали в первую очередь отрабатывать именно этот механизм. Идея была в том, что по бортам робота должны быть синхронно движущиеся цепи, в некоторые звеньях которых должны быть встроены специальные зацепы.
В качестве тягового двигателя был опять же выбран шаговик. Главная приводная звездочка была куплена вместе с подшипниками в магазине. А вот торцевые звездочки были сделаны из составной фанеры. Ключевой слой с зубцами вследствие пришлось обточить под углом, чтобы цепь не стремилась заскочить на кромки зубцов:
Так как специального устройства для расклепки цепей у нас не было, пришлось просто стачивать в нужном месте звенья и потом соединять их специальным замком (который тоже был заранее куплен):
Следующим шагом на очереди было размещение двух тяговых двигателей для вертикального перемещения (по одному на каждую ось, как уже упомяналось выше):
Тем временем была закончена основная несущая конструкция, внутри которой должны как раз размещаться ячейки и перемещаться робот:
Также была сделана первая тестовая коробка и размещены уголки-направляющие для нее:
По самому первому плану робот был должен вобрать в себя как функционал вертикального перемещения, так и горизонтального перемещения между колонками. Но для того чтобы избежать довольно нетривиального механизма переключения стрелок, было решено разделить функции на две части — основного робота, который умеет перемещаться вертикально в колонке и захватывать-сбрасывать ящик, и тележку, которая будет перекатывать его между колонками:
Наконец-то мы могли приступить к самому интересному — реальным тестам вертикального подъема работа по рейкам. В том числе с разной нагрузкой:
Тесты проводили прямо в тележке, т.к. она содержала в себе продолжение тех же самых зубчатых реек:
В последний день были вырезаны и уложены зубчатые рельсы для горизонтальной тележки и смонтирована для демонстрации одна колонка вертикальных реек:
Для тележки были выбраны аналогичные зубчатые колеса, а в качестве ходового двигателя был взят еще один шаговик, чтобы точно позиционировать тележку в колонке:
Конечно, в силу очень сжатого срока многое не удалось довести до ума. В первую очередь, это полноценно отработать механизм захвата контейнера и переход робота из тележки в колонку и обратно.
Также одним из главных выводов стала недостаточная, несмотря на все расчеты, мощность двигателей. Самодельного редуктора в виде конических шестерней оказалось мало, шаговые двигатели периодически пропускали шаги.
За новостями проекта можно следить в группе:
https://vk.com/teleitems
0 комментариев