Робот-Манипулятор "Жужелица"
0
Добавил: lolizz00 (Связаться с автором)
Made in: Фаблаб Политех
Описание
Состав команды:
Общий обзор
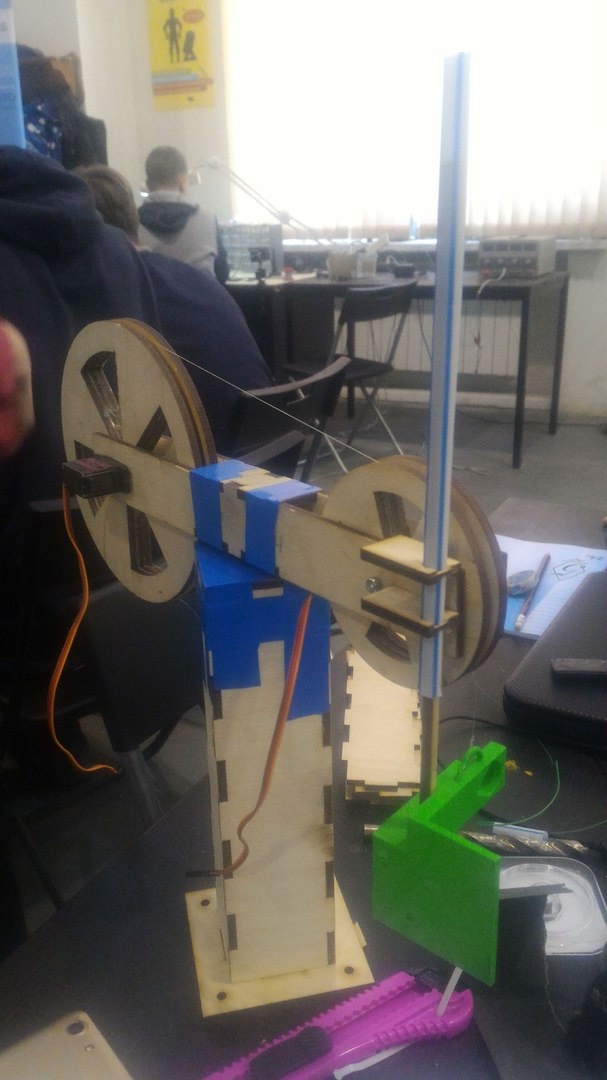
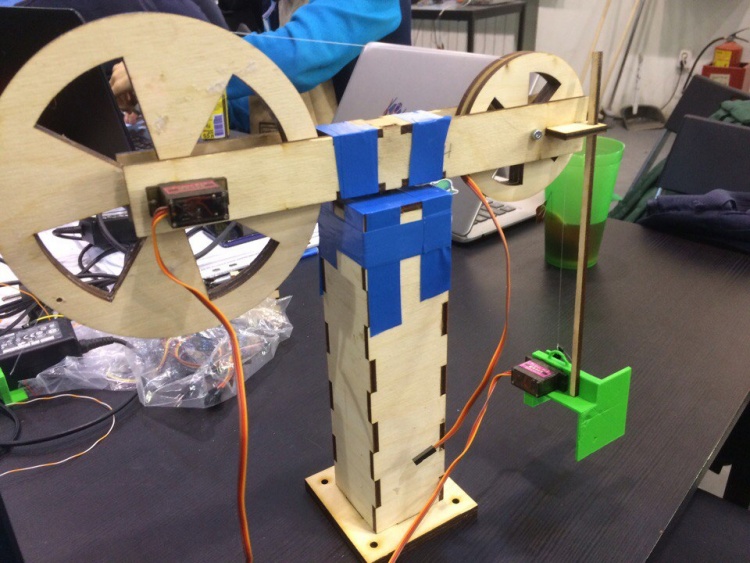
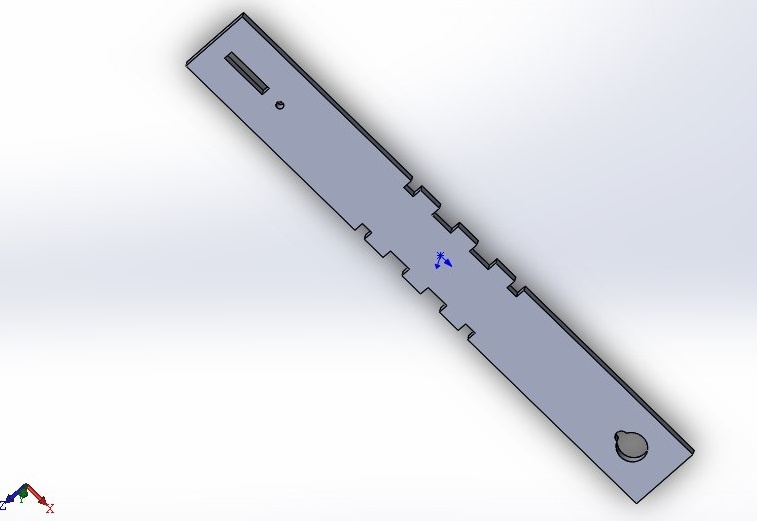
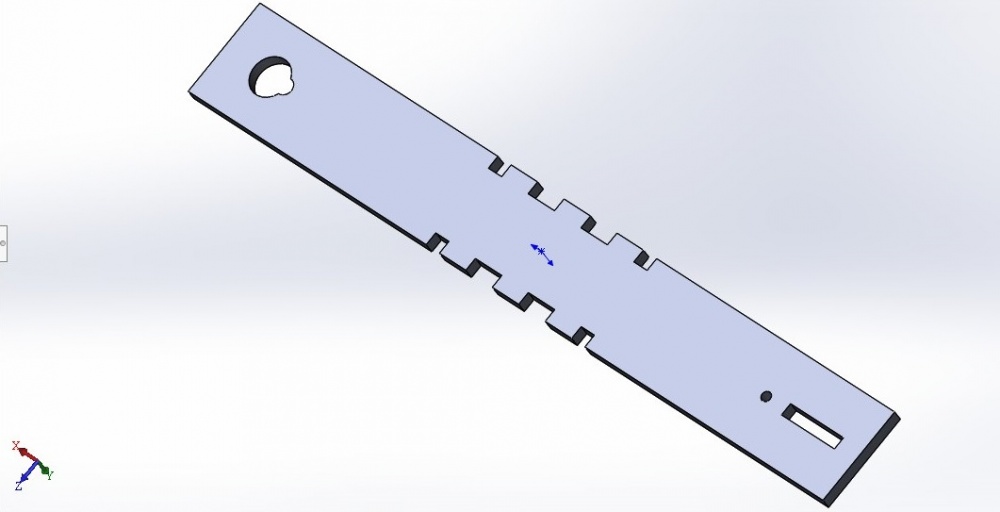
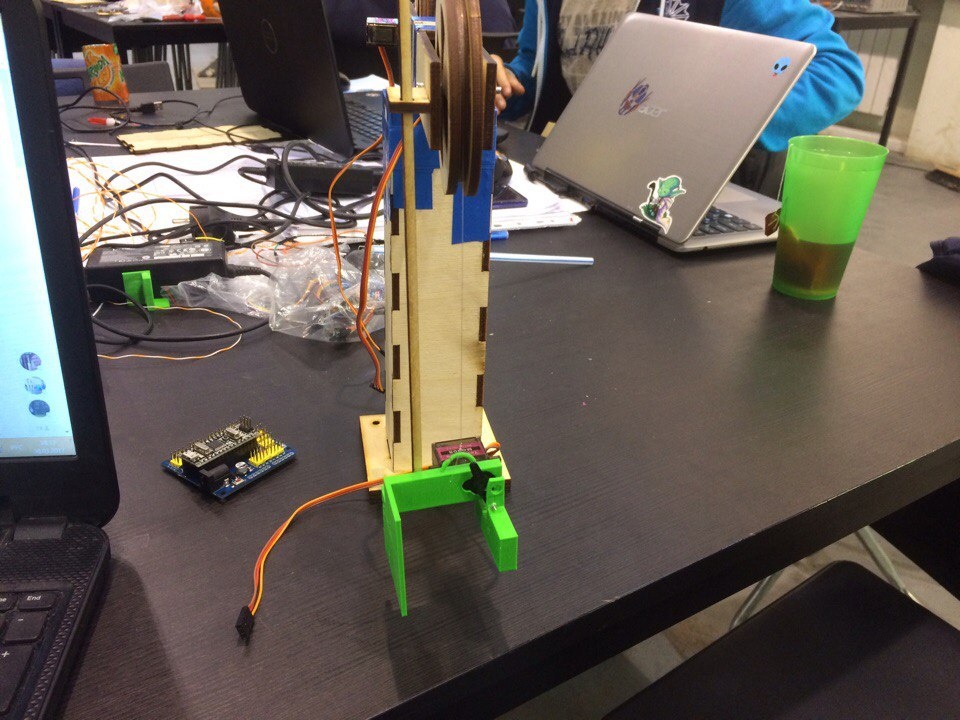
За основу «Жужелицы» была взята конструкция подъемного крана. Корпус был вырезан лазерным станком из фанеры, а крепления для сервоприводов распечатаны на 3D-принтере. Смемещение подвижный частей осуществляется за счет трех серводвигателей. На шкив наматывается лебедка-леска, корпус крана вращается по окружности, фиксируя манипулятор в нужном положениии. Управление реализовано на платформе Arduino.
Этапы создания
Механические составляющие
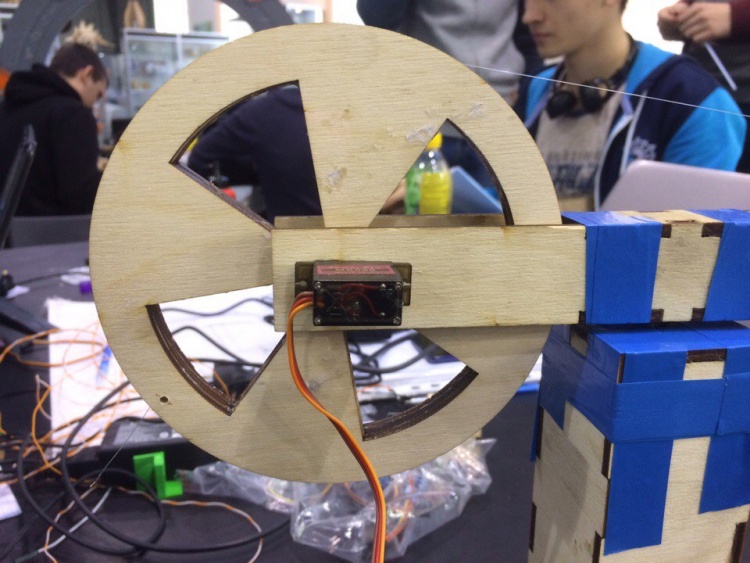
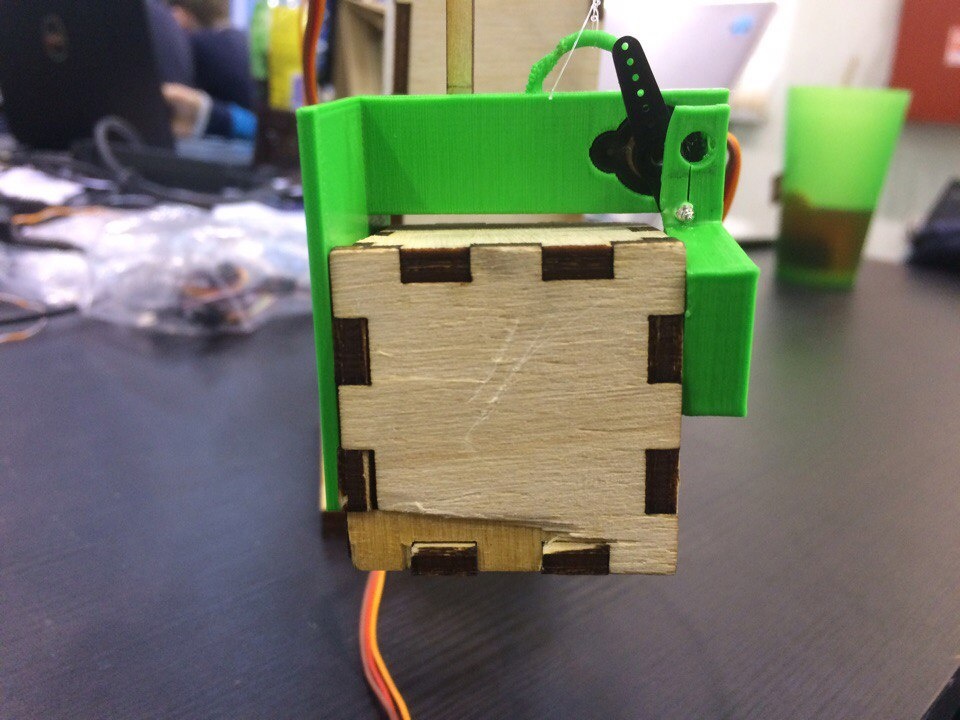
Всего в прототипе используются три сервопривода с четким распределением «ролей»:
а) вращательное движение по круговой траектории (ось OX и OY)
б) подъем-спуск манипулятора ( ось OZ)
в) перевод манипулятора в открытое и закрытое положение

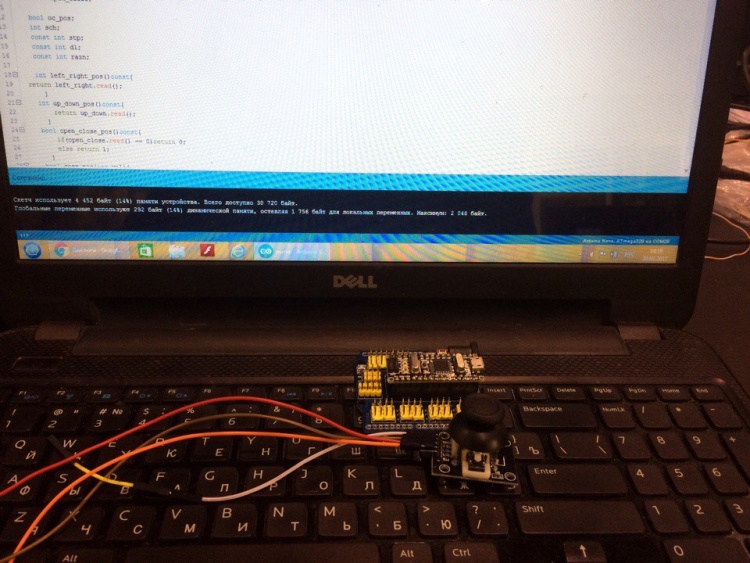
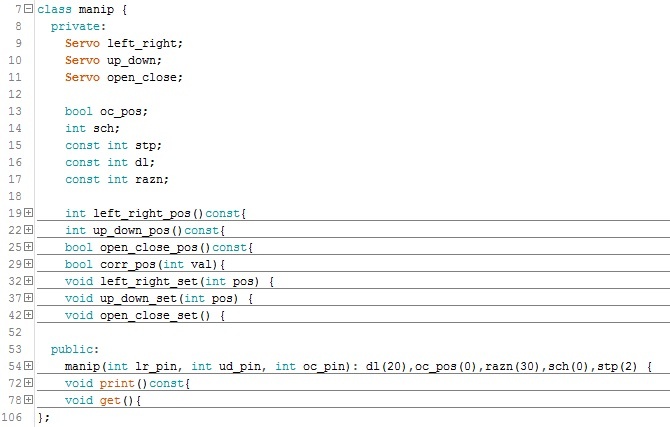
Система управления
Управление реализованно через Arduino. Микроконтроллер считывает смещение джойстика и нажатие на кнопку, отбрасывает «мусорные» сигналы, проверяет на корректность и подает команды на серводвигатели.
- Волков Тимофей — программист
- Скворцов Павел — механик-крановщик
- Малова Полина — электронщик
- Неелов Максим — дизайнер широкого профиля
Общий обзор
За основу «Жужелицы» была взята конструкция подъемного крана. Корпус был вырезан лазерным станком из фанеры, а крепления для сервоприводов распечатаны на 3D-принтере. Смемещение подвижный частей осуществляется за счет трех серводвигателей. На шкив наматывается лебедка-леска, корпус крана вращается по окружности, фиксируя манипулятор в нужном положениии. Управление реализовано на платформе Arduino.
Этапы создания
- Выбор оптимальной констукции и обсуждение концепции
- Проектирование отдельных деталей в программе Autodesk Fusion 360
- Соединение деталей в единый макет
- Печать и вырезка деталей
- Сборка
- Разработка программы для управление
- Тестирование
Механические составляющие
Всего в прототипе используются три сервопривода с четким распределением «ролей»:
а) вращательное движение по круговой траектории (ось OX и OY)
б) подъем-спуск манипулятора ( ось OZ)
в) перевод манипулятора в открытое и закрытое положение
Система управления
Управление реализованно через Arduino. Микроконтроллер считывает смещение джойстика и нажатие на кнопку, отбрасывает «мусорные» сигналы, проверяет на корректность и подает команды на серводвигатели.


0 комментариев