
робот- Famichoff Line Tracker 40000 (FLT40000)
+1
Добавил: KRASAVA229 (Связаться с автором)
Made in: Фаблаб Политех
Описание
Целью нашей работы является создание робота, который должен автономно ездить по линии. Соревнования в конце интенсива выяснят, какая команда лучше справилась с поставленной задачей.
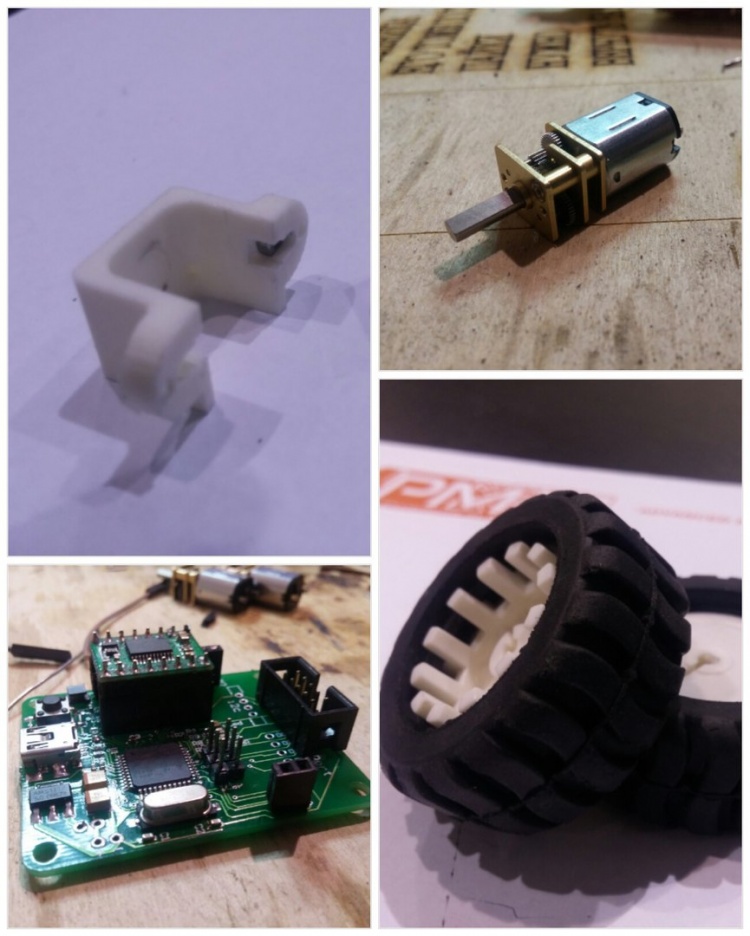
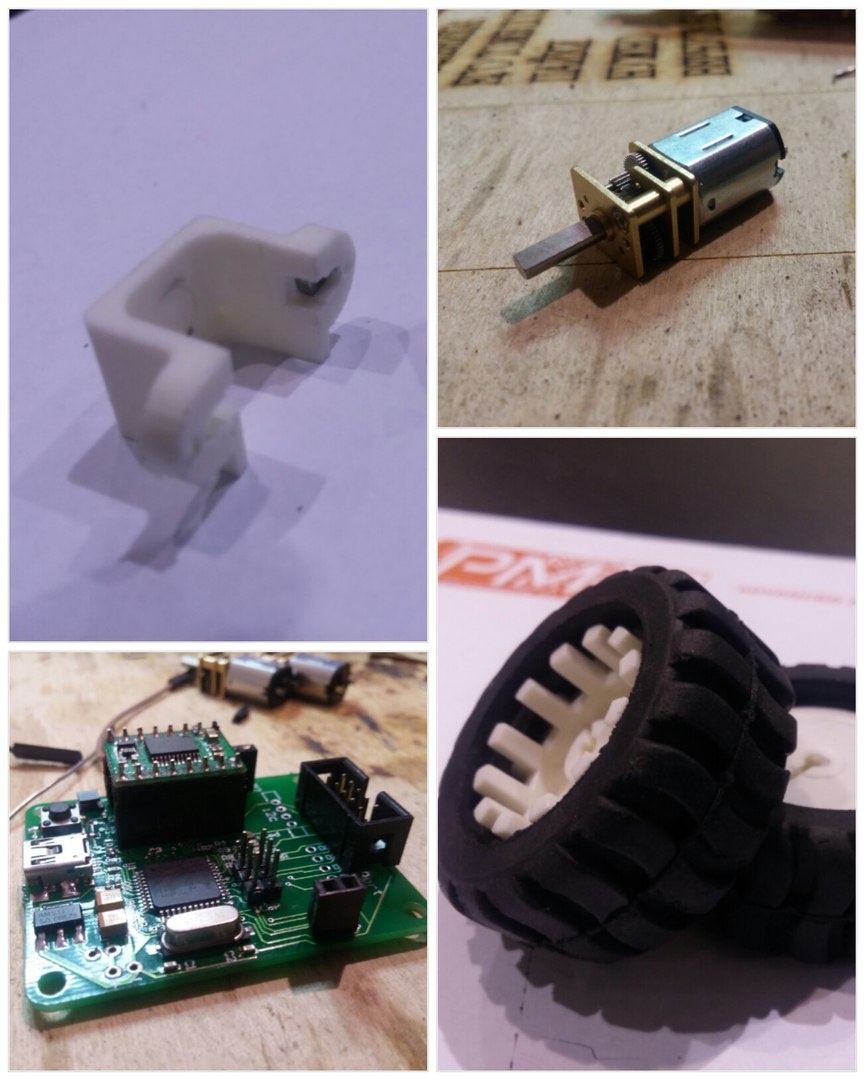
Для работы нам были даны следующие компоненты:
В процессе работы, нашей командой были освоены такие программы, как autodeskfusion360(программа для 3D-моделирования), arduinoIDE(программа для написания скетчей и программ), а также лазерный станок, на котором были вырезаны все детали робота.

В первый день участников интенсива познакомили с деятельностью ФАБЛАБа и его оборудованием, рассказали о задаче, которую мы должны будем выполнить, ознакомили с ТБ, с правилами написания статьи, а также с программами, с которыми мы должны будем столкнуться за эти пять дней – с 3Dмоделированием и программированием. Также в первый день большинство команд определились со своим составом, однако разделение на команды произошло в начале второго дня.

Второй день команды начали с определения концепции робота, назначили роли в команде, обсудили различные конструкционные особенности и, в основном, приступили к моделированию деталей. В нашей команде в первый день произошло разделение на две группы – моделистов и программистов. Такое разделение во время общей беседы мы признали наиболее эффективным. К концу дня в программе для моделирования уже появилась сборка нашего робота, все детали были готовы к резке, которая должна была осуществиться на следующий день.
На третий день были внесены коррективы в наши модели в связи с тем, что нам выдали 3Dмодель датчика, и мы поняли, что разработанные нами крепежные места не подходят новому датчику. После этого был изготовлен первый прототип робота. С самого начала мы ставили упор на качество сборки и эстетику, поэтому все отверстия и пазы были несколько раз выверены. Параллельно с этим группа программистов изучала это непростое дело, писали свои первые скетчи.
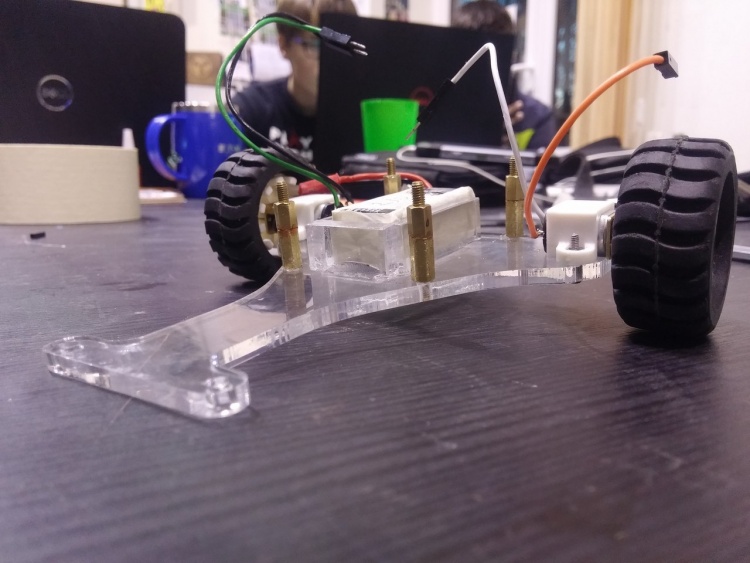
Четвертый день начался с моделирования новых колес. На общем сборе в предыдущий день, мы решили, что для того, чтобы иметь преимущество в скорости, можно увеличить диаметр колес. Новые колеса были сделаны из силиконового герметика, что добавило нам еще и лучшее сцепление с поверхностью. В это же время программисты освоились в программе arduinoIDE, были сделаны и опробованы программы по движению с заданной траекторией, была готова программа для движения по линии, однако датчик, который мы использовали был неисправен, и нам пришлось ждать последнего, пятого дня, что бы поставить его и отладить программу.

Тут стоит отметить, что мы использовали «продвинутый» пропорциональный регулятор в качестве программы, что облегчило нам отладку, т.к. все аспекты движения по линии были настраиваемы, требовалось только подобрать коэффициенты и все!
Пятый день начался с того, что мы поставили новые датчики и «железная» часть робота была готова. После этого знаменательного события группа моделистов приступила к оформлению эстетической части нашего робота, т.к., напомню, с самого начала мы делали упор на эстетическую часть. Группа программистов в это время доделывала программу, подбирая наилучшие коэффициенты реакции робота на столкновение с линией.
Уже на первом прогоне робота были выявлены основные преимущества робота: из-за увеличенных колес робот стал быстрее, программа отрабатывала все моменты, которые возникали во время движения, широкая рама в паре с малым весом отлично отрабатывала резкие повороты
Несколько слов о нашей команде
Состав:
Орехов Алексей – моделист, сборка робота, оформление документации(В том числе и эта статья)

Козлов Алексей – сборка робота, пайка

Даниил Фомичев – программирование

Тимофей Метелёв — программирование

Для работы нам были даны следующие компоненты:
- Программируемая arduino — совместимая плата
- два мотор – редуктора
- крепления для двигателей и комплект крепежа
- пластмассовые колеса с резиновыми шинами.
В процессе работы, нашей командой были освоены такие программы, как autodeskfusion360(программа для 3D-моделирования), arduinoIDE(программа для написания скетчей и программ), а также лазерный станок, на котором были вырезаны все детали робота.
В первый день участников интенсива познакомили с деятельностью ФАБЛАБа и его оборудованием, рассказали о задаче, которую мы должны будем выполнить, ознакомили с ТБ, с правилами написания статьи, а также с программами, с которыми мы должны будем столкнуться за эти пять дней – с 3Dмоделированием и программированием. Также в первый день большинство команд определились со своим составом, однако разделение на команды произошло в начале второго дня.
Второй день команды начали с определения концепции робота, назначили роли в команде, обсудили различные конструкционные особенности и, в основном, приступили к моделированию деталей. В нашей команде в первый день произошло разделение на две группы – моделистов и программистов. Такое разделение во время общей беседы мы признали наиболее эффективным. К концу дня в программе для моделирования уже появилась сборка нашего робота, все детали были готовы к резке, которая должна была осуществиться на следующий день.
На третий день были внесены коррективы в наши модели в связи с тем, что нам выдали 3Dмодель датчика, и мы поняли, что разработанные нами крепежные места не подходят новому датчику. После этого был изготовлен первый прототип робота. С самого начала мы ставили упор на качество сборки и эстетику, поэтому все отверстия и пазы были несколько раз выверены. Параллельно с этим группа программистов изучала это непростое дело, писали свои первые скетчи.
Четвертый день начался с моделирования новых колес. На общем сборе в предыдущий день, мы решили, что для того, чтобы иметь преимущество в скорости, можно увеличить диаметр колес. Новые колеса были сделаны из силиконового герметика, что добавило нам еще и лучшее сцепление с поверхностью. В это же время программисты освоились в программе arduinoIDE, были сделаны и опробованы программы по движению с заданной траекторией, была готова программа для движения по линии, однако датчик, который мы использовали был неисправен, и нам пришлось ждать последнего, пятого дня, что бы поставить его и отладить программу.
Тут стоит отметить, что мы использовали «продвинутый» пропорциональный регулятор в качестве программы, что облегчило нам отладку, т.к. все аспекты движения по линии были настраиваемы, требовалось только подобрать коэффициенты и все!
Пятый день начался с того, что мы поставили новые датчики и «железная» часть робота была готова. После этого знаменательного события группа моделистов приступила к оформлению эстетической части нашего робота, т.к., напомню, с самого начала мы делали упор на эстетическую часть. Группа программистов в это время доделывала программу, подбирая наилучшие коэффициенты реакции робота на столкновение с линией.
Уже на первом прогоне робота были выявлены основные преимущества робота: из-за увеличенных колес робот стал быстрее, программа отрабатывала все моменты, которые возникали во время движения, широкая рама в паре с малым весом отлично отрабатывала резкие повороты
Несколько слов о нашей команде
Состав:
Орехов Алексей – моделист, сборка робота, оформление документации(В том числе и эта статья)
Козлов Алексей – сборка робота, пайка
Даниил Фомичев – программирование
Тимофей Метелёв — программирование




0 комментариев