
Манипулятор "Фамичофф 3000"
+1
Добавил: gonshiki (Связаться с автором)
Made in: Фаблаб Политех
Описание
Наш дружный коллектив состоит из 5 человек:

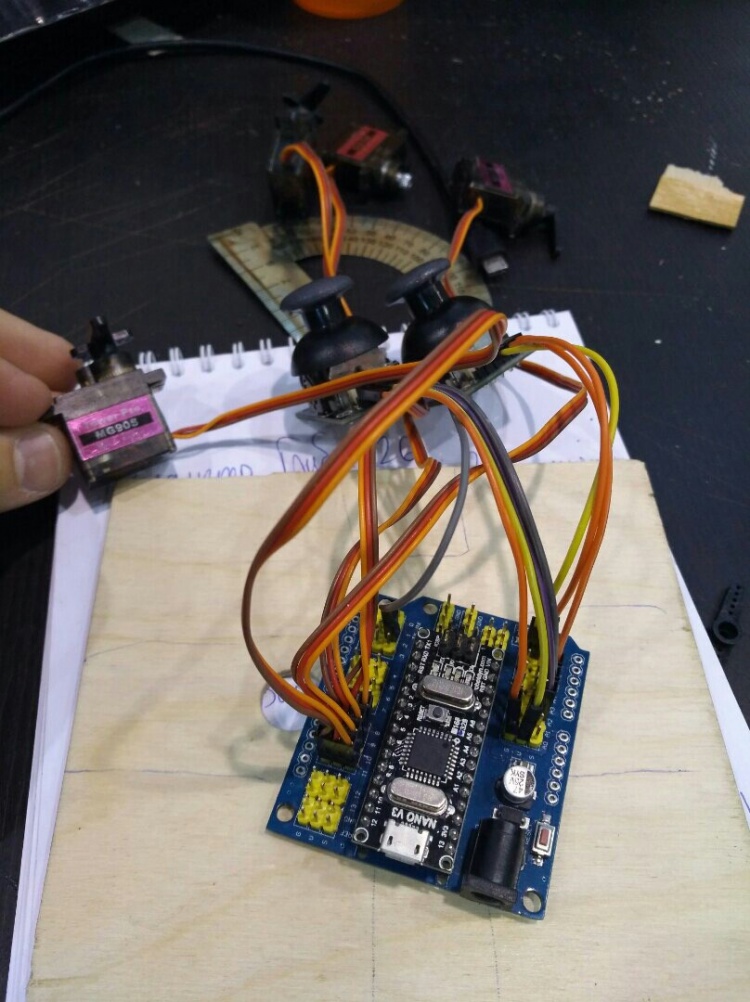
Так же для программирования нашего робота нам выдали контроллер Arduino Nano и шилд для сервоприводов.
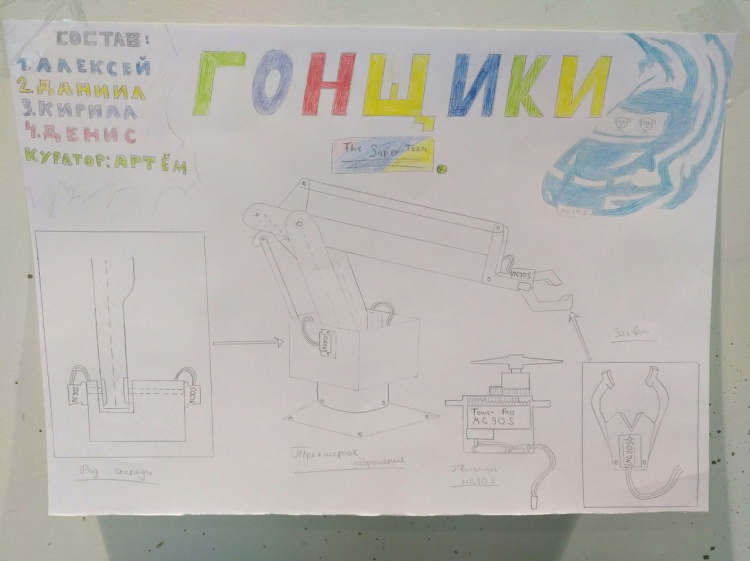
За первый день работы мы обсудили механику и строение нашего будущего робота «Строителя». Перебрав много вариантов и сделав множество чертежей, мы пришли к общему мнению и начали обдумывать конкретику построения нашего робота. Также наши программисты начали разбираться в программе Arduino, появились первые плоды. Мы остановились на идее о том, чтобы наш робот управлялся с помощбю двух джойстиков. Также мы решили, что каждый сервопривод будет отвечать за определенные команды. Сделанный нами плокат отображал общий вид будущего творения.
 День второй:
День второй:
Во второй день наши программисты начали углубленно изучать программу, в которой они работали. Прочитав несколько статей в интернете, Даня и Кирилл имели общее представление об Arduino и могли смело начинать программирование нашего робота. Денис и Лёша начали моделировать детали в программе Solid Works.
 День третий:
День третий:
В третий день наши программисты закончили программирование Arduino Nano. Также мы вырезали некоторые детали на лазере и прикинули общее строение робота, обсудили некоторые проблемы в строении и начали их исправлять.
 День четвертый:
День четвертый:
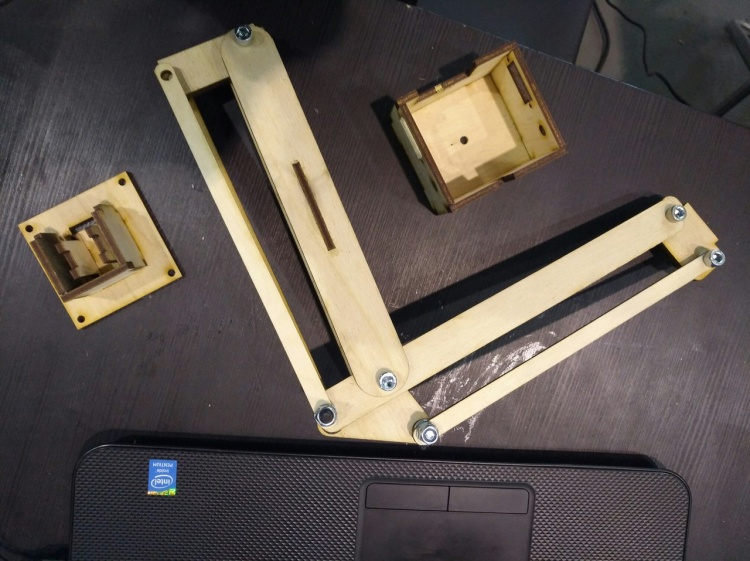
В четвертый день мы закончили с моделированием в Solid Works и, вырезав на лазаре все детали, начали собирать робота. Мы почти вышли на финишную прямую, посмотрим, что будет завтра...
 День пятый:
День пятый:
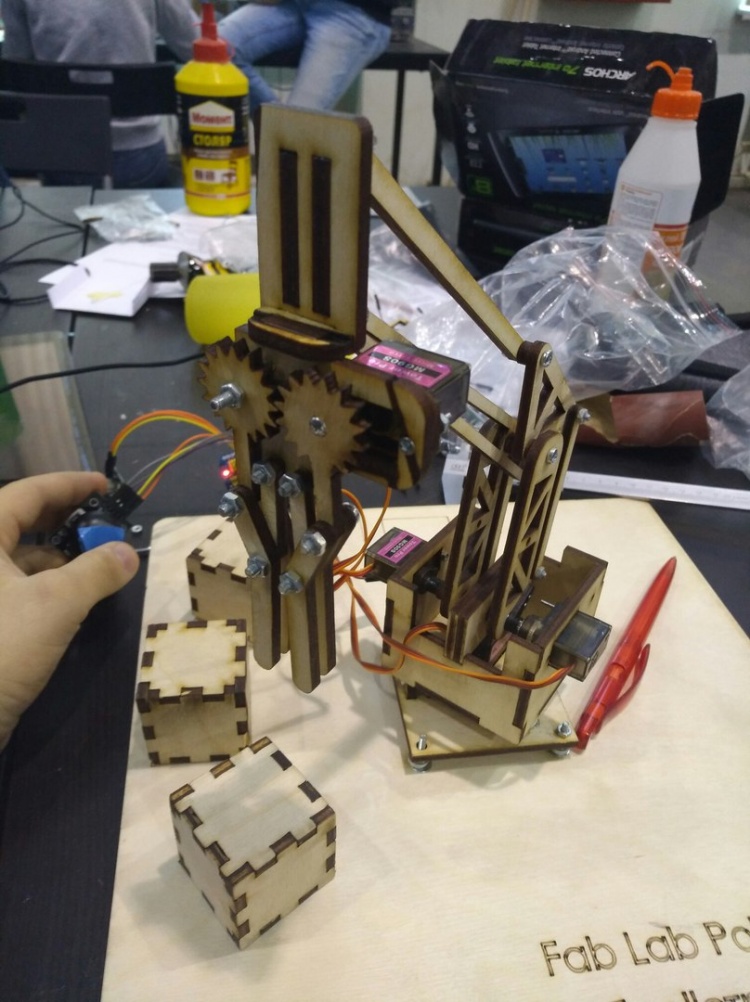
Сегодня последний день работы. Мы собрали робота, исправили некоторые незначительные ошибки в сборке. Создались некоторые проблемы с Arduino, но мы попытались их решить. Также мы соорудили коробку для джойстиков, чтобы роботом было удобнее управлять. Протестировав «Фамичофф 3000», мы поняли, что робот почти готов.
- Самсонов Артем — куратор
- Орехов Алексей — механик, моделист
- Серкин Денис - дизайнер, моделист
- Чередников Кирилл - программист
- Фомичёв Даниил — программист, электронщик
Цели.
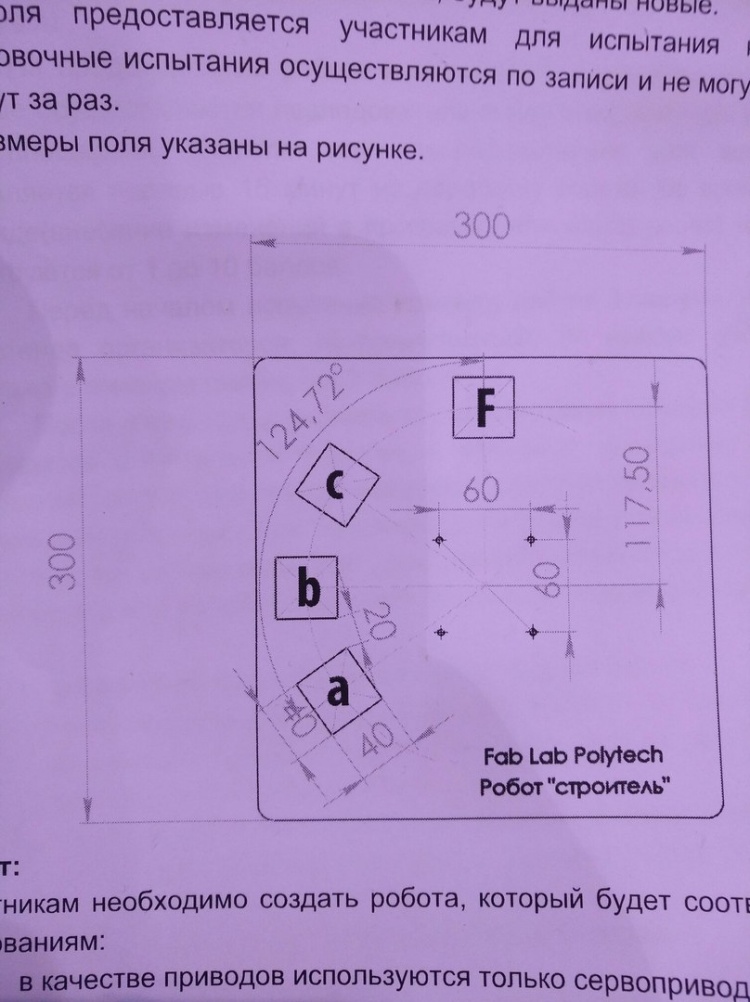
На этот раз нам было дано задание за 5 дней создать робота-манипулятора, который должен был схватывать, перемещать и ставить друг на друга кубики. Все измерения нам были выданы заранее.Приборы.
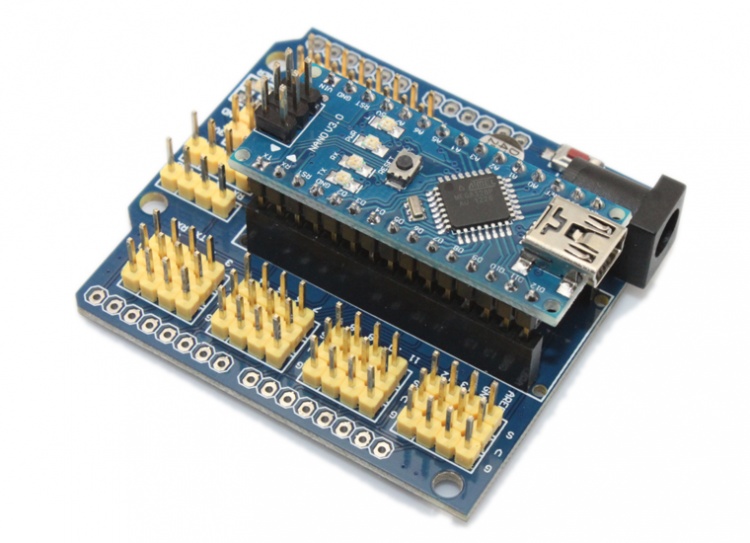
В качестве приводов нам были выданы сервоприводы Tower Pro MG90S в количестве 4 штук.Так же для программирования нашего робота нам выдали контроллер Arduino Nano и шилд для сервоприводов.
Этапы работы.
День первый:За первый день работы мы обсудили механику и строение нашего будущего робота «Строителя». Перебрав много вариантов и сделав множество чертежей, мы пришли к общему мнению и начали обдумывать конкретику построения нашего робота. Также наши программисты начали разбираться в программе Arduino, появились первые плоды. Мы остановились на идее о том, чтобы наш робот управлялся с помощбю двух джойстиков. Также мы решили, что каждый сервопривод будет отвечать за определенные команды. Сделанный нами плокат отображал общий вид будущего творения.
День второй:Во второй день наши программисты начали углубленно изучать программу, в которой они работали. Прочитав несколько статей в интернете, Даня и Кирилл имели общее представление об Arduino и могли смело начинать программирование нашего робота. Денис и Лёша начали моделировать детали в программе Solid Works.
День третий:В третий день наши программисты закончили программирование Arduino Nano. Также мы вырезали некоторые детали на лазере и прикинули общее строение робота, обсудили некоторые проблемы в строении и начали их исправлять.
День четвертый:В четвертый день мы закончили с моделированием в Solid Works и, вырезав на лазаре все детали, начали собирать робота. Мы почти вышли на финишную прямую, посмотрим, что будет завтра...
День пятый:Сегодня последний день работы. Мы собрали робота, исправили некоторые незначительные ошибки в сборке. Создались некоторые проблемы с Arduino, но мы попытались их решить. Также мы соорудили коробку для джойстиков, чтобы роботом было удобнее управлять. Протестировав «Фамичофф 3000», мы поняли, что робот почти готов.
0 комментариев