Описание
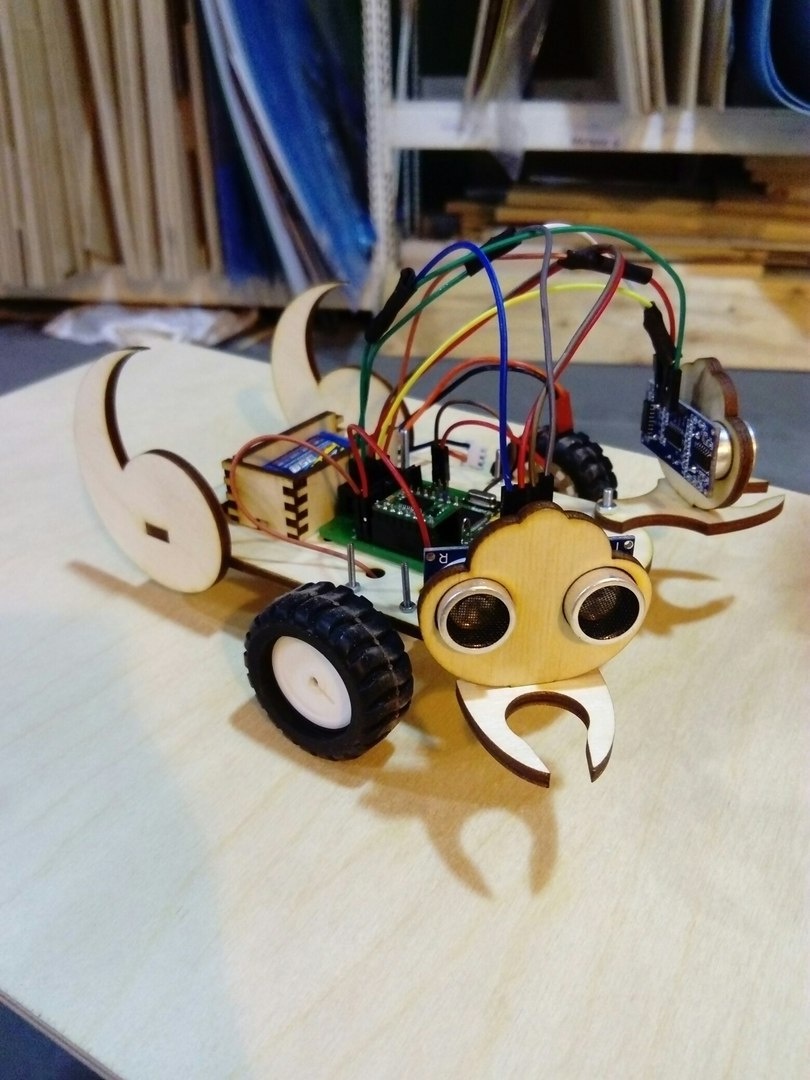
Цель: создать робота, способного проехать по трассе 8 метров.
Исходнвые материалы:
1. Два колеса
2. Дальномеры (HC-SR04)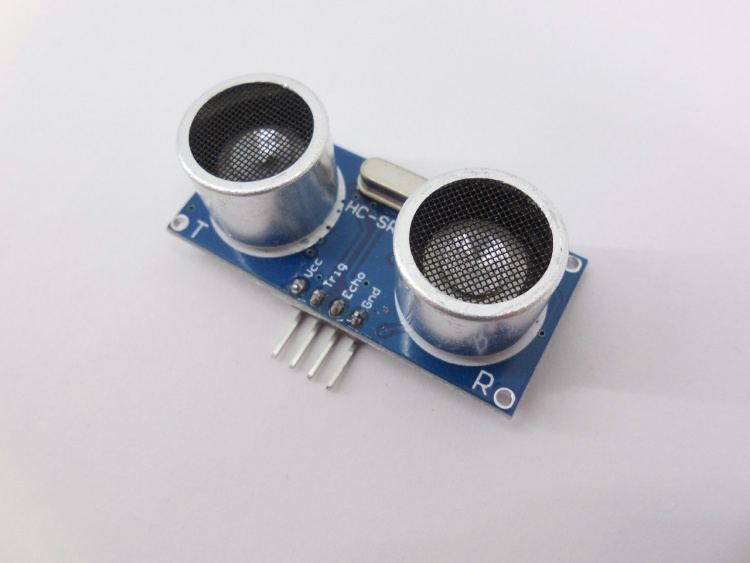
3. Arduinо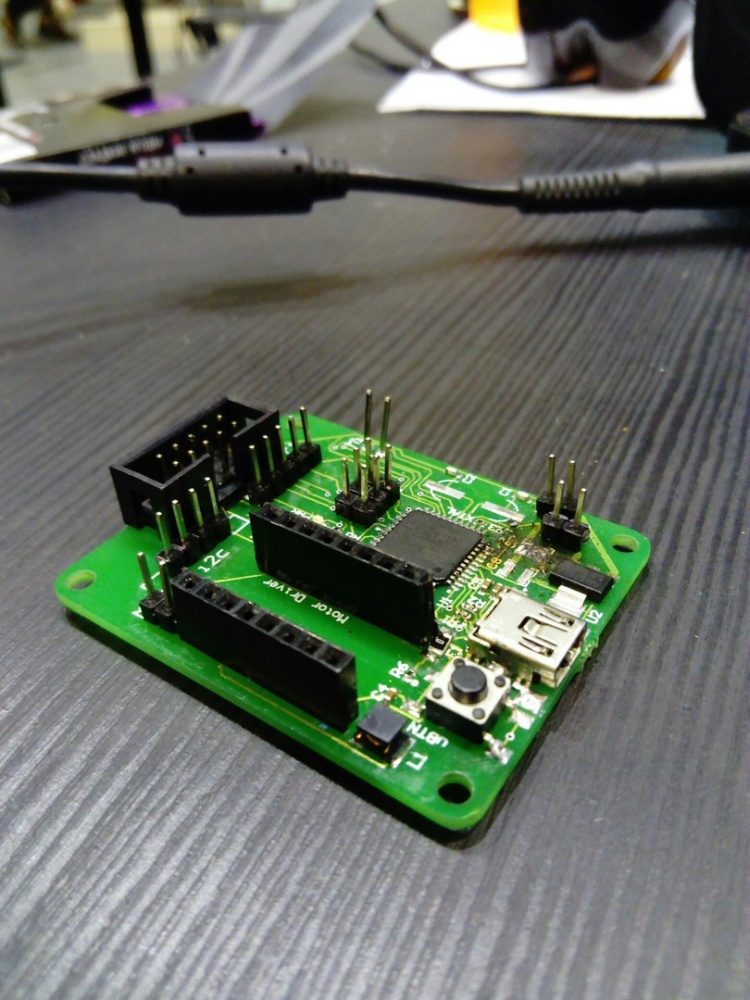
4. Моторы

Техническое решение:
1. Все детали были смоделированы в программе Fusion 360 и вырезаны с помощью лазерного станка.
2. С помощью спроектированых креплений мы установили ультразвуковые датчики.
3. Плата и аккамулятор были закреплены на основании корпуса.
Преимущества решений:
1. Высокая подвижность
2. Компактность
3. Изготовление деталей из фанеры увеличило скорость создания модели и её легкость.
4. Спроектированые крепления помогли поддержать индивидуальность модели и оригинальный дизайн.
Достоинства:
1. Оригинальнй авторский дизайн с дополнительными элементами декора.
2. Два датчика для экономии места и уникальности конструкции.
3. Третье колесо для поддержания ровновесия.
Скриншоты сборки: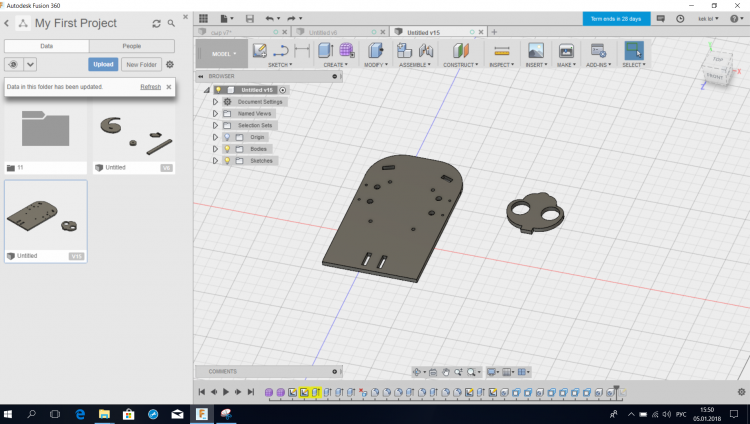

Команда и роли:
1. Андрей Дедиашвили- электрик
2. Ксения Дедкова- занималась моделированием
3. Николай Амбарцумов- моделировал корпус и основания
4. Святослав Романов- главный помошник, собирал робота
5. Вася Строганова- программист
Фотографии по ходу работы:

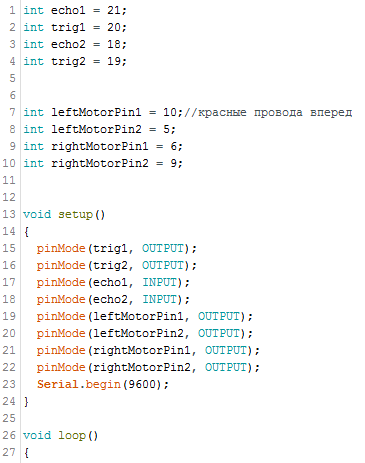
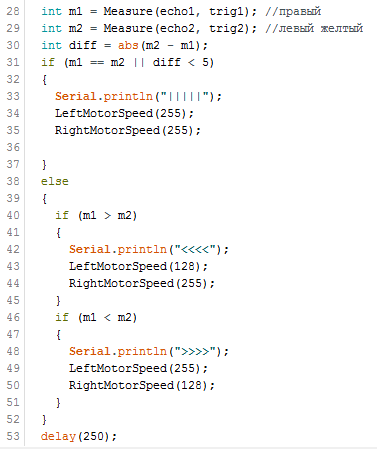
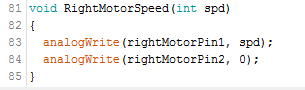
Код Arduino:

Исходнвые материалы:
1. Два колеса
2. Дальномеры (HC-SR04)
3. Arduinо
4. Моторы
Техническое решение:
1. Все детали были смоделированы в программе Fusion 360 и вырезаны с помощью лазерного станка.
2. С помощью спроектированых креплений мы установили ультразвуковые датчики.
3. Плата и аккамулятор были закреплены на основании корпуса.
Преимущества решений:
1. Высокая подвижность
2. Компактность
3. Изготовление деталей из фанеры увеличило скорость создания модели и её легкость.
4. Спроектированые крепления помогли поддержать индивидуальность модели и оригинальный дизайн.
Достоинства:
1. Оригинальнй авторский дизайн с дополнительными элементами декора.
2. Два датчика для экономии места и уникальности конструкции.
3. Третье колесо для поддержания ровновесия.
Скриншоты сборки:
Команда и роли:
1. Андрей Дедиашвили- электрик
2. Ксения Дедкова- занималась моделированием
3. Николай Амбарцумов- моделировал корпус и основания
4. Святослав Романов- главный помошник, собирал робота
5. Вася Строганова- программист
Фотографии по ходу работы:
Код Arduino:
0 комментариев